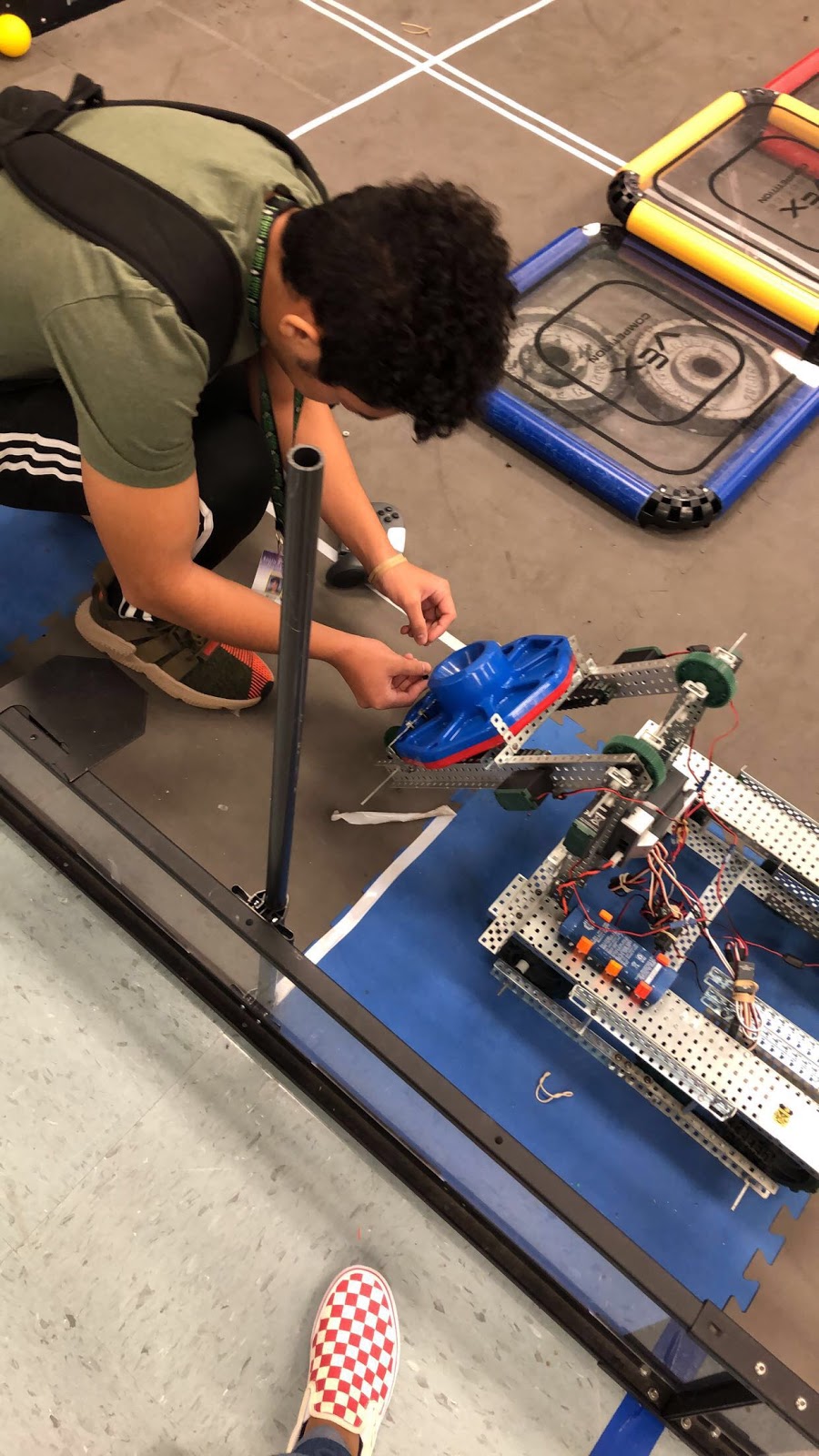
Today's one of the last few days we have, before midterms, to work on our robot and get it ready. We are really close to finishing and hope that we can complete by next class. Our robot just needs a few final tweaks before it's ready to go. Melqui finally completed his certification yesterday.